Tienes perdida de pasos y no sabes como solucionar el problema, pero usas un simple motor Nema y no monitorizas su posición, realmente no sabes donde esta. Convierte tu motor Nema en lazo cerrado para conocer en todo momento donde esta.
Si bien es cierto que en el mercado tenemos motores Nema sin control (lazo abierto), motores de lazo cerrado (conocemos la posición del motor en todo momento y si algo va mal, podemos saberlo) y servos (que son de lazo cerrado pero con mucha mas potencia y suavidad en su movimiento). Pero al final de cuentas, un motor Nema de lazo cerrado no deja de ser el motor normal que conocemos todos mas un encoder que monitoriza el eje. El uso de hardware adicional convierte un motor Nema en lazo cerrado, y esto nos permite tener este modelo sin un gran coste.
El caso es que si tenemos motores normales, los que no llevan control de ningún tipo, podemos añadir una plaquita para tener un control de lazo cerrado y que en caso de perder pasos, moverlos de posición, etc. el propio motor (bueno, la electrónica añadida) lo va a detectar y corregir.
Todo esto es muy bonito, pero hago una aclaración. Con este sistema (que podría re adaptarse) estamos monitorizando el eje del motor. Remarco, el eje del motor, con lo que si nuestro sistema mecánico tiene un error fuera del bloque motor, no lo podríamos detectar. Quiero decir, si por ejemplo nos falla el acople entre motor y husillo, porque este acople patina. O lo mismo para una polea de correa, que la propia polea patina dentro del eje del motor. Estos fallos no los detectaremos con este sistema. Para poder detectarlos, necesitaríamos monitorizar el husillo o la correa. Y ocurriría lo mismo si usamos un motor de lazo cerrado comprado o un servo, lo que se controla es el eje del motor, todo lo que venga después, no tiene control.
Por este motivo, tenemos encoders que podemos acoplar en un extremo de un husillo, o se puede añadir una polea dentada para monitorizar el movimiento de la correa en un punto diferente al motor, o un sistema que mide las revoluciones de giro de un elemento, etc. Hay sensores y sistemas que nos permiten monitorizar los elementos mecánicos, podemos conocer con precisión que hacen nuestras maquinas, mientras que el presupuesto nos lo permita.
En esta ocasión, vamos a ver un par de proyectos de los últimos años que permiten añadir el control de lazo cerrado a motores Nema, y ademas son proyectos OpenSource, con lo que cualquiera puede replicarlos en su casa. El control que hace este tipo de placas es mediante un sensor magnético de precisión. Al eje del motor se le añade un pequeñito imán, mediante el cual podemos conocer su posición.
Ambos proyectos pueden utilizarse para el control de motores Nema 17 y Nema 23, aunque se puede adaptar a cualquier otro tipo, ya que el driver va integrado en la propia PCB (se puede añadir un driver externo). Es cuestión de adaptar el proyecto a las necesidades que pueda requerir vuestro proyecto.
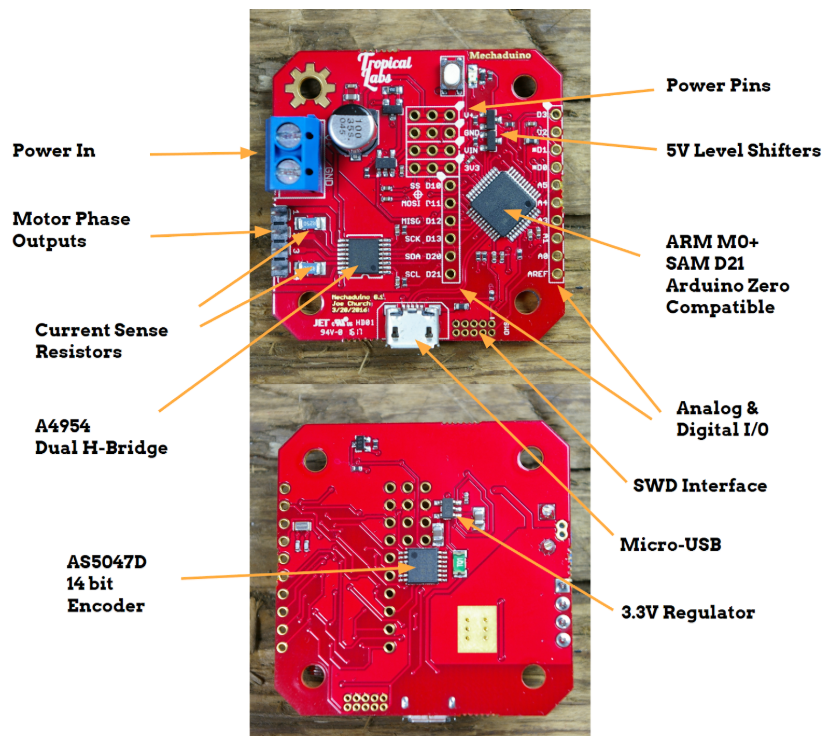
Proyecto de conversión a lazo cerrado Mechaduino

Uno de los dos proyectos que voy a comentar es Mechaduino, el cual ya tiene la segunda revisión de su hardware. Se lanzó como un Kickstarter y con bastante éxito.
La web del proyecto la podréis encontrar aquí: https://tropical-labs.com/
Y el repo en Github: https://github.com/jcchurch13/Mechaduino-Hardware
En los enlaces podréis encontrar un montón de información, posibilidad de compra, etc. Os añado alguna imagen de como es la placa y un vídeo que explica bastante bien de que se trata este tipo de control.
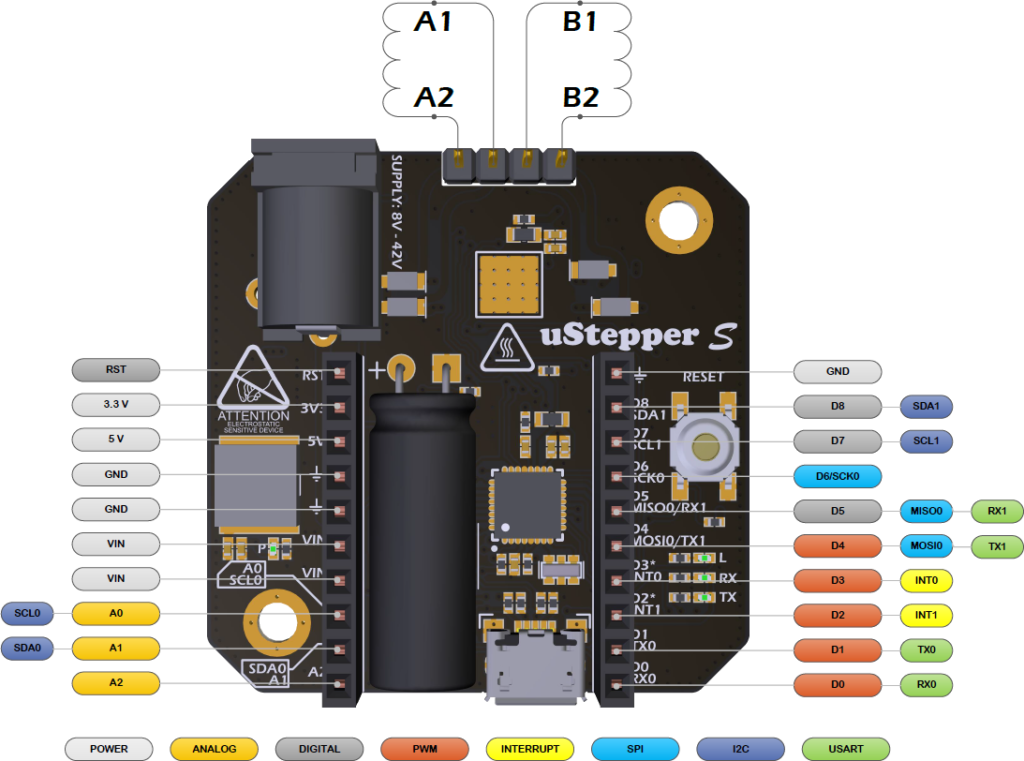
Proyecto conversión de motor Nema a lazo cerrado con uStepper

Este segundo proyecto, al igual que el primero, también ha iterado sus diseños, e incluso tiene alguna variante mas de hardware que nos permite un control un poco mejor (con mas resolución o poder entregar un poquito mas de corriente al motor). Decir que este proyecto tiene algún año mas de vida que el anterior, pero nada significativo. Ambos realizan la monitorización del eje del motor mediante un imán que se pega al eje del motor, para ser monitorizado mediante un sensor magnético.
La web del proyecto: https://www.ustepper.com/what-is-ustepper/
Enlace al repo de Github: https://github.com/uStepper/uStepper
Una imagen de como es la PCB y un vídeo sobre el proyecto:
Y por mi parte esto es todo, no me pongo a añadir info que tenéis en las webs de cada proyecto, os los doy a conocer y cada uno puede investigarlos mas en detalle si le interesan. Convierte tu motor Nema en lazo cerrado con estos dos proyectos, que además son OpenSource y te permiten replicarlos o adaptarlos a tus necesidades.
Se que hay algún proyecto mas que se ha realizado a partir de estos, pero no lo tengo controlado. Si alguien conoce alguno mas similar, que lo comente y lo añadimos para disponer de la info localizada en un punto.
Si buscas componentes electrónicos, o huellas y modelos 3d, en el post donde comprar componentes electrónicos hay varios recursos interesantes.
Y nada mas, nos vemos en el siguiente,
Un Saludo,
Entradas relacionadas
Entradas mas recientes
Colaboración con JLCPCB
Para este año tenemos un pequeño gran cambio, y es que me han contactado recientemente para hacer una colaboración con JLCPCB. Tras el intercambio de
Nuevos expositores de madera para coleccionar figuras Lego
Hace ya un tiempo que termine este proyecto, pero se me quedo por escribir su correspondiente entrada. Se trata de los nuevos expositores de madera
Protección contra polaridad inversa
Si buscamos implementar un sistema de protección contra polaridad inversa, podemos utilizar un simple mosfet! La protección contra polaridad inversa es una de esas cosas